
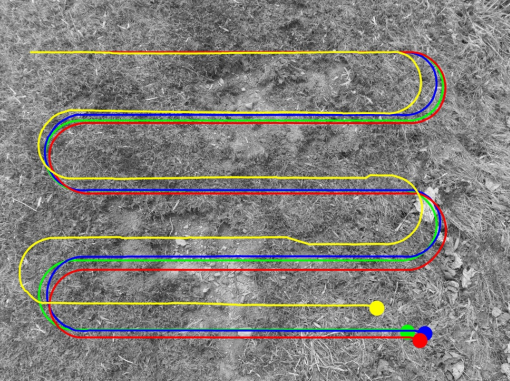
In recent years optical-flow-aided position measurement solutions have been used in both commercial and academic applications. These systems are used for navigating unmanned aerial vehicles (UAVs) in GPS-deprived environments. Movement in sequential images is detected and converted to real world position change. Multiple approaches have been suggested, ranging from using an optical mouse sensor to the use of a stereo camera setup. Our research focuses on single camera solutions. Previous research has used a variety of optical flow algorithms for single camera solutions. This paper presents a comparison on three algorithms to check if using different algorithms yield different results in terms of quality and CPU time. This paper also provides insight into the general theory behind using single camera optical flow for UAV navigation. The compared algorithms are the Lucas-Kanade method, Gunnar Farneback’s algorithm and Block Matching. A testing framework ¨ and custom indoor and outdoor datasets were created to measure algorithms flow estimation quality and computation time. Characteristic differences were found between the performance of the algorithms in terms of both computation time and quality. Choosing between algorithms therefore can increase flow estimation quality or reduce CPU time usage. Also different winners per test set were found in terms of estimation quality.
Jasper de Boer, Mathieu Kalksma
Published in RUG Student Colloquium, SC@RUG 2015