
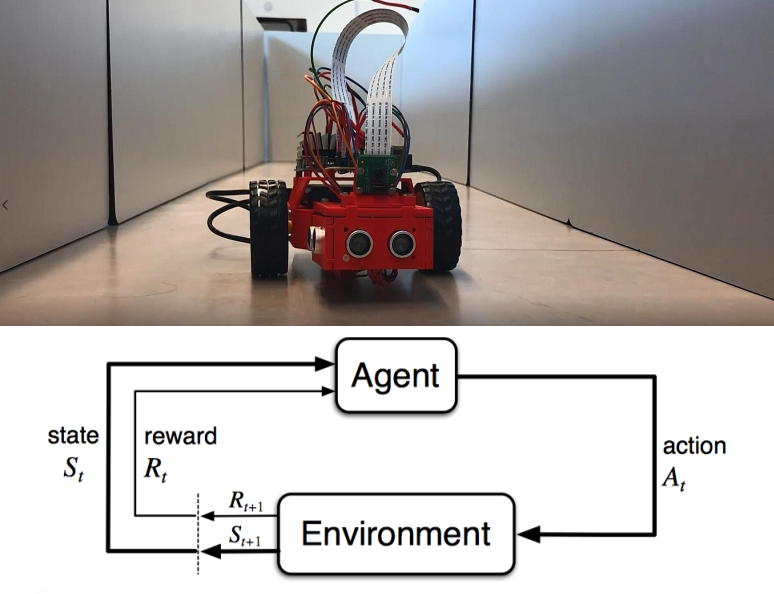
Deep Reinforcement Learning has become increasingly popular. This paper takes a closer look at Deep Q Learning, which is a branch of Deep Reinforcement Learning that focuses on scoring possible options and chosing the option with the best score. Whether this is possible to apply on a robots like a JetBot, which is a small robot car developed by Nvidia, is interesting for research in Autonomous behaviour. To what extent Deep Reinforcement Learning is suitable for autonomous driving and how efficient this is, is questionable. To find out how well these techniques fit on the JetBot, the JetBot uses a camera and sensors as input for a Deep Q-learning network to prove its performance in various experiments. Corridor navigation is one of this experiments in which the JetBot has to navigate through corridors without bumping into walls. This experiment shows that the basics of Deep Reinforcement Learning are a valid option for autonomous behaviour on the JetBot in both navigation and collision avoidance. Still there is much more potential in even more complex Deep Reinforcement models.