
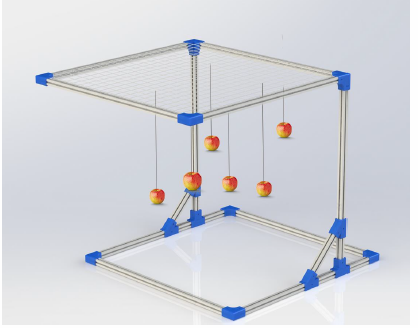
Attaching a robotic arm on a drone and make it inspect apples in an orchard is proposed to be done autonomous. This approach uses simulated data to train and test the YOLOv5 object detect used for this application. This approach put together the following research question: Can simulated data be used to train the detection model and test the localization of apples in mock orchards? The following steps were taken to investigate whether this approach is a step in the right direction: collecting data, training the YOLOv5s model on this data, compare different approaches on YOLOv5s and localise the objects in this data with the best model for this purpose. The different approaches on using YOLOv5 were able to achieve equal mAP values. By using tiled YOLOv5s an accurate localization of the detected objects was achieved with a mAP of 90.9% on object detection. This concludes that simulated data can be used for this purpose. The next step is to examine how the simulated data performs on a real situation. And eventually have a drone fly towards the apples it is detecting